Prądy rozruchowe silnika indukcyjnego. Sposoby uruchamiania silników indukcyjnych
W momencie rozruchu prędkość wirnika silnika wynosi zero, a pole wirujące natychmiast uzyskuje prędkość synchroniczną względem wirnika, w wyniku czego indukowane jest duże pole elektromagnetyczne w uzwojeniu wirnika. W tym przypadku prądy wirnika i stojana są kilkakrotnie wyższe niż ich wartości minimalne, ponieważ rosną wraz ze wzrostem poślizgu wirnika, tj. ze spadkiem prędkości (ryc. 10).
Prąd rozruchowy silniki indukcyjne z wirnikiem klatkowym jest 5-10 razy wyższy niż nominalny (początkowy moment obrotowy wynosi 1,1 - 1,8 nominalnej wartości momentu obrotowego). Ponieważ prąd ten przepływa przez uzwojenie silnika przez krótki czas i tylko podczas procesu rozruchu, jeśli rozruch silnika nie jest zbyt częsty, nie powoduje to przegrzania silnika. Dlatego uruchomienie asynchronicznych silników elektrycznych o niskiej mocy z reguły odbywa się przez proste połączenie z siecią. Jednak wysoki prąd rozruchowy dużych silników elektrycznych w zasilających je sieciach elektrycznych powoduje gwałtowne i znaczące (zwłaszcza w sieciach małej mocy) skoki mocy, co niekorzystnie wpływa na innych odbiorców energii elektrycznej wchodzących w skład tej samej sieci.
Jak widać na ryc. 10, początkowy moment obrotowy silnika indukcyjnego jest zauważalnie mniejszy niż maksymalny, a gdy obciążenie wału wirnika przekracza M. n, silnik nie chce się uruchomić. W takim przypadku, jeśli stojan nie zostanie odłączony od sieci, duży prąd rozruchowy doprowadzi do przegrzania uzwojeń i awarii silnika.
Aby zapobiec opisanym niekorzystnym sytuacjom, konieczne jest ograniczenie prądu rozruchowego silników asynchronicznych podczas przykładania do nich napięcia lub zwiększania momentu rozruchowego.
Redukcję napięcia na uzwojeniach silnika indukcyjnego podczas rozruchu osiąga się na różne sposoby:
uruchomienie za pomocą autotransformatora lub sterownika indukcyjnego;
zaczynając od przełączenia uzwojenia stojana z gwiazdy na trójkąt;
rozruch z włączeniem dodatkowego oporu w uzwojeniu stojana silnika.
Jednak gdy napięcie początkowe spada, moment rozruchowy silnika indukcyjnego również spada, ponieważ jest on proporcjonalny do kwadratu napięcia początkowego. Dlatego wskazane metody rozruchu można zastosować głównie do napędzania silników mechanizmów, które nie wymagają dużych momentów rozruchowych podczas rozruchu (na przykład uruchomienie silnika wentylatora, silnika nieobciążonego, silnika na biegu jałowym itp.).
Silnik asynchroniczny z wirnikiem fazowym uruchamiany jest za pomocą reostatu rozruchowego o maksymalnej rezystancji R zewn. połączony szeregowo z uzwojeniem wirnika (patrz rys. 3). W tym przypadku krytyczny poślizg s k \u003d ( R ” 2 +R ext) / ( X 1 +X ” 2) wzrasta i wielkość momentu krytycznego M. k \u003d 3 pU 1 2 / 2 1 ( X 1 +X ” 2) nie zmienia się. Sztuczne momenty poślizgowe z dodatkowym oporem pokazano na ryc. 11. Wartość R ext jest wybierane tak, aby poślizg krytyczny był równy jedności, wtedy moment początkowy zwiększy się do wartości krytycznej. Zwiększ M.występuje z powodu wzrostu aktywnego składnika prądu. Wartość skuteczna prądu rozruchowego maleje.

Wraz ze wzrostem prędkości maleje częstotliwość rotacji pola magnetycznego względem wirnika. Odpowiednio, pole elektromagnetyczne i prąd wirnika są zmniejszone. Dlatego wraz ze wzrostem prędkości silnika wartość rezystancji rozruchowej w obwodzie uzwojenia wirnika może być stopniowo zmniejszana ( R" ext), bez obawy, że prąd silnika wzrośnie do wartości niebezpiecznych dla niego. Przy całkowicie wycofanym oporze wyjściowego reostatu ( R"" ext \u003d 0) kończy się rozruch silnika. Ta metoda umożliwia podanie momentu rozruchowego niezbędnego do uruchomienia silnika.
Po włączeniu działania dowolnego urządzenia, mechanizmu lub urządzenia przez pewien czas zachodzą w nich procesy, które nazywane są niestacjonarnymi lub uruchamiającymi się. Najbardziej znane przykłady z życia - oderwanie, powiedzmy, załadowanej ciężarówki, pociągu, dość wyraźnie pokazuje, że początkowe pchnięcie siły zwykle wymaga więcej niż wysiłków w przyszłości.
Te same zjawiska występują w urządzeniach elektrycznych: lampach, silnikach elektrycznych, elektromagnesach itp. Procesy rozruchowe w tych urządzeniach zależą od stanu elementów roboczych: żarnika lampy, stanu magnesowania rdzenia cewki elektromagnesu, stopnia jonizacji szczeliny między elektrodami itp. Rozważmy na przykład żarnik żarówki oświetleniowej. Dobrze wiadomo, że w stanie zimnym ma znacznie niższy opór niż z
ogrzewanie do 1000 stopni. w trybie pracy. Spróbuj obliczyć opór
żarnik żarówki 100-watowej wynosi około 490 omów, a wartość zmierzona omomierzem w stanie bezczynności jest mniejsza niż 50 omów. A teraz najbardziej interesującą rzeczą jest obliczenie prądu rozruchowego, a zrozumiesz, dlaczego żarówki są zapalone po włączeniu.
Okazuje się, że po włączeniu prąd osiąga 4-5 A, a to więcej niż 1 kW. Dlaczego więc 100-watowe żarówki nie palą się całkowicie? Tak, tylko dlatego, że po podgrzaniu nitka żarówki ma
rosnący opór, który w stanie ustalonym staje się stały, większy niż wartość początkowa i ogranicza prąd roboczy do około 0,5 A.
Silniki elektryczne mają najszersze zastosowanie w technologii, dlatego znajomość charakterystyk ich charakterystyk rozruchowych ma ogromne znaczenie dla prawidłowego działania napędów elektrycznych. Przesuw i moment obrotowy na wale są głównymi parametrami wpływającymi na prąd rozruchowy. Pierwszy wiąże prędkość obrotową pola elektromagnetycznego z prędkością obrotową wirnika i zmniejsza się wraz z zestawem prędkości od 1 do wartości minimalnej, a drugi określa obciążenie mechaniczne wału, maksymalne na początku rozruchu i nominalne po pełnym przyspieszeniu. przy rozruchu odpowiada transformatorowi ze zwarciem uzwojenie wtórne. Z powodu jej małego
rezystancji, prąd rozruchowy silnika skacze nawet dziesięć razy więcej niż jego wartość znamionowa.
Doprowadzenie prądu do uzwojeń prowadzi do zwiększenia nasycenia rdzenia wirnika polem magnetycznym i pojawienia się emf samindukcja, która prowadzi do wzrostu indukcji
rezystancja obwodu. Wirnik zaczyna się obracać, a współczynnik poślizgu zmniejsza się, tj. silnik przyspiesza. W takim przypadku prąd rozruchowy ze wzrostem rezystancji spada do stanu ustalonego.
Występują problemy spowodowane zwiększonymi prądami rozruchowymi
z powodu przegrzania silników elektrycznych, przeciążenia sieci elektrycznych w tej chwili
rozruch, występowanie udarowych obciążeń mechanicznych w połączonych mechanizmach, na przykład skrzyniach biegów. Istnieją dwie klasy urządzeń, które rozwiązują te problemy w nowoczesnej technologii - softstartery i przetwornice częstotliwości.
Ich wybór to zadanie inżynierskie z analizą wielu operacji
charakterystyka Obciążenie w rzeczywistych warunkach użytkowania silników elektrycznych jest podzielone na dwie grupy: wentylator-pompa i ogólnie przemysł. Łagodne rozruszniki stosowane są głównie do obciążeń grupy wentylatorów. Takie regulatory ograniczają prąd rozruchowy do poziomu nieprzekraczającego 2 wartości nominalnych, zamiast 5-10 razy podczas normalnego rozruchu, poprzez zmianę napięcia uzwojeń.
Najbardziej rozpowszechnione w branży są silniki elektryczne, jednak ich prostota konstrukcji i niski koszt mają przeciwną stronę - trudne warunki rozruchu, które są ułatwione przez przetwornice częstotliwości. Szczególnie cenna jest właściwość częstotliwości
konwertery utrzymują prąd rozruchowy dla
długi czas - minuta lub więcej. Najlepszymi przykładami współczesnych przetwornic są inteligentne urządzenia, które wykonują nie tylko regulację procesu rozruchu, ale także optymalizację rozruchu zgodnie z dowolnym kryterium operacyjnym: wielkością i stałością prądu rozruchowego, poślizgiem, momentem obrotowym na wale, optymalnym współczynnikiem mocy itp.
Wyrzutnie właściwości silnika .
Podczas uruchamiania wirnik silnika, pokonując moment obciążenia i moment bezwładności, przyspiesza od prędkości obrotowej n= 0 przedtem n . Poślizg różni się od s n = 1 przedtem s . Podczas rozruchu muszą być spełnione dwa podstawowe wymagania: moment obrotowy musi przekraczać moment oporu ( M. vp\u003e M. z) i prąd rozruchowy Ja n powinien być jak najmniejszy.
W zależności od konstrukcji wirnika (klatka lub faza wiewiórki), mocy silnika, charakteru obciążenia, możliwe są różne metody rozruchu: rozruch bezpośredni, uruchomienie przy użyciu dodatkowych rezystancji, rozruch przy niskim napięciu itp. Różne metody rozruchu omówiono bardziej szczegółowo poniżej.
Bezpośredni start. Uruchamianie silnika przez bezpośrednie połączenie uzwojenia stojana z napięciem sieciowym nazywa się startem bezpośrednim. Obwód bezpośredniego rozruchu pokazano na ryc. 3.22 Po włączeniu przełącznika w pierwszej chwili poślizgnij s = loraz zredukowany prąd w wirniku i równy mu prąd stojana
, (3.37)
maksimum (patrz sekcja 3.19 dla s \u003d 1). Gdy wirnik przyspiesza, poślizg maleje, a zatem pod koniec rozruchu prąd jest znacznie mniejszy niż w pierwszym momencie. W silnikach szeregowych z bezpośrednim startem krotność prądu rozruchowego wynosi k I \u003d I P / I 1NOM \u003d (5, ..., 7), a większa wartość dotyczy silników o wyższej mocy.
Początkowa wartość momentu obrotowego wynika z (3.23) przy s \u003d 1: 
Z rys. 3.18 pokazuje, że początkowy moment obrotowy jest zbliżony do nominalnego i znacznie mniej krytyczny. W przypadku silników szeregowych wielokrotność początkowego momentu obrotowego M P / M NOM \u003d (1,0, ..., 1,8).
Podane dane pokazują, że podczas bezpośredniego rozruchu w sieci zasilającej silnik występuje rozruch, który może spowodować spadek napięcia tak znaczny, że inne silniki zasilane przez tę sieć mogą się zatrzymać. Z drugiej strony, ze względu na mały moment rozruchowy podczas rozruchu pod obciążeniem, silnik może nie pokonać momentu oporu na wale i nie będzie się poruszał. Ze względu na te wady bezpośredniego rozruchu można używać tylko z silnikami małej i średniej mocy (do około 50 kW).
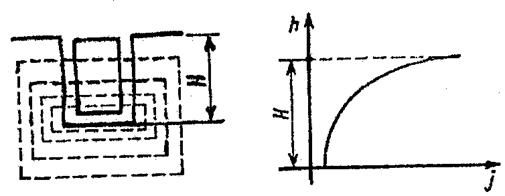
Uruchamianie silników o ulepszonych właściwościach rozruchowych. Poprawę właściwości rozruchowych silników indukcyjnych osiąga się poprzez zastosowanie efektu przesunięcia prądu w wirniku dzięki specjalnej konstrukcji klatki wiewiórkowej. Efekt przesunięcia prądu jest następujący: sprzężenie strumienia i indukcyjność X 2 przewodów w rowku wirnika jest wyższa, im bliżej są do dołu rowka (ryc. 3.23). Ponadto X 2 jest wprost proporcjonalny do częstotliwości prądu wirnika.
Dlatego przy uruchamianiu silnika, gdy s \u003d 1 i f 2 \u003d f 1 \u003d 50 Hz, rezystancja indukcyjna X 2 \u003d max i pod wpływem tego prądu zostaje przesunięta do zewnętrznej warstwy rowka. Gęstość prądu j wzdłuż współrzędnej h jest rozkładana wzdłuż krzywej pokazanej na ryc. W rezultacie prąd przepływa głównie wzdłuż zewnętrznej części przewodnika, tj. przez znacznie mniejszy przekrój pręta, a zatem rezystancja czynna uzwojenia wirnika R2 jest znacznie większa niż podczas normalnej pracy. Z tego powodu prąd rozruchowy maleje, a moment początkowy M P wzrasta (patrz (3.37), (3.38)). Gdy silnik przyspiesza, częstotliwość prądu poślizgu i wirnika spada i osiąga 1–4 Hz do końca rozruchu. Przy tej częstotliwości rezystancja indukcyjna jest niewielka, a prąd rozkłada się równomiernie na całym przekroju przewodu. Dzięki wyraźnemu efektowi przesunięcia prądu możliwe jest rozpoczęcie bezpośrednio przy niższych prądach rozruchowych i wyższych momentach rozruchowych.
Silniki o ulepszonych właściwościach rozruchowych obejmują silniki z wirnikami z głębokim rowkiem, podwójną klatkę wiewiórczą i kilka innych.
Ryc. 3.23 Ryc. 3.24
Silniki z głębokimi rowkami. Jak pokazano na ryc. 3.25, rowek wirnika jest wykonany w postaci wąskiej szczeliny, której głębokość jest około 10 razy większa niż jego szerokość. W tych rowkach-rowkach układa się uzwojenie w postaci wąskich pasków miedzi. Rozkład strumienia magnetycznego pokazuje, że indukcyjność i indukcyjność w dolnej części przewodnika są znacznie większe niż w górnej części. Dlatego podczas uruchamiania prąd jest przemieszczany do górnej części pręta, a rezystancja czynna znacznie wzrasta. W miarę przyspieszania silnika poślizg maleje, a gęstość prądu w przekroju staje się prawie taka sama. Aby zwiększyć efekt przesunięcia prądu, głębokie rowki wykonuje się nie tylko w postaci szczeliny, ale także w kształcie trapezu. W tym przypadku głębokość rowka jest nieco mniejsza niż w przypadku kształtu prostokątnego.

Silniki z podwójną klatką. W takich silnikach uzwojenia wirnika są wykonane w postaci dwóch komórek (ryc. 3.26): w zewnętrznych rowkach 1 uzwojenie z mosiądzu jest umieszczone wewnątrz 2 - uzwojenie miedzianych przewodów. Dlatego zewnętrzne uzwojenie ma większy opór niż wewnętrzny. Podczas rozruchu uzwojenie zewnętrzne jest sprzężone z bardzo słabym strumieniem magnetycznym, a uzwojenie wewnętrzne jest stosunkowo silne. W rezultacie prąd jest przemieszczany do komórki zewnętrznej i do prąd wewnętrzny prawie żaden.
Gdy silnik przyspiesza, prąd z komórki zewnętrznej przechodzi do wewnętrznej, a przy s \u003d s NOM przepływa głównie przez komórkę wewnętrzną. Prąd w zewnętrznej komórce jest stosunkowo niewielki. Wynikowy moment rozruchowy, składający się z momentów z dwóch ogniw, jest znacznie większy niż w przypadku silników o normalnej konstrukcji i nieco większy niż w przypadku silników z głębokim rowkiem. Należy jednak pamiętać, że koszt silników z podwójną klatką wirnika jest wyższy.
Rozpocznij od przełączenia uzwojenia stojana.
Jeśli podczas normalnej pracy silnika fazy stojana są połączone w trójkąt, wówczas, jak pokazano na ryc. 3.27, przy starcie są początkowo połączone z gwiazdą. Aby to zrobić, najpierw włącz przełącznik Q, a następnie przełącznik S znajduje się w dolnej pozycji Start. W tej pozycji końce faz X, Y, Z są ze sobą połączone, tj. fazy są połączone gwiazdą. W tym przypadku napięcie fazowe jest około 3 razy mniejsze niż napięcie liniowe. W rezultacie prąd linii podczas rozruchu jest 3 razy mniejszy niż w przypadku połączenia trójkątem. Kiedy wirnik przyspiesza na końcu startu, przełącznik S jest przesuwany do górnej pozycji i, jak można zobaczyć na ryc. 3.27, fazy stojana są ponownie połączone w trójkąt. Wadą tego sposobu jest to, że moment rozruchowy również zmniejsza się 3-krotnie, ponieważ moment ten jest proporcjonalny do kwadratu napięcia fazowego, który jest około 3 razy mniejszy, gdy fazy są połączone gwiazdą. Dlatego ta metoda ma zastosowanie do małego momentu obciążenia i tylko w przypadku silników, które normalnie działają podczas łączenia uzwojenia stojana z trójkątem.

Rozpocznij, gdy w obwodzie stojana znajdują się dodatkowe rezystory . (Ryc. 3.28). Przed uruchomieniem przełącznik (rozrusznik) jest w stanie otwartym i zamyka przełącznik Q 1.
Jednocześnie dodatkowe rezystory R ADD są zawarte w obwodzie stojana. W rezultacie uzwojenie stojana zasilane jest napięciem zredukowanym U 1n \u003d U 1NOM - Ja n R DODAJ. Po przyspieszeniu silnika przełącznik Q 2 zamyka się i uzwojenie stojana zostaje włączone przy napięciu znamionowym U 1NOM. Wybór R ADD może ograniczyć prąd rozruchowy do dopuszczalnego. Należy pamiętać, że moment początkowy proporcjonalny do U 2 1P będzie mniejszy i równy nominalnemu (U 1P / U 1NOM) 2. Należy zauważyć, że przy tej metodzie rozruchu straty rezystancji R ADD (R ADD są znaczące Ja 2 1n). Zamiast rezystorów R ADD możliwe jest zastosowanie cewek o rezystancji indukcyjnej X ADD zbliżonych do R ADD.
Zastosowanie cewek może zmniejszyć utratę rezystancji rozruchowej.

Ryc. 3.29 Ryc. 3.28
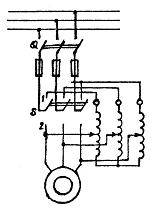
Uruchomienie autotransformatora. Oprócz tych metod można zastosować tak zwany start autotransformatora.
Odpowiedni obwód pokazano na ryc. 29. Przed uruchomieniem przełącznik S jest ustawiony w pozycji 1 a następnie autotransformator zostaje włączony, a stojan zasilany jest niskim napięciem U 1P. Silnik przyspiesza przy zmniejszonym napięciu, a na końcu przyspieszenia przełącznik S jest ustawiony w pozycji 2 a stojan jest zasilany napięciem znamionowym U 1nom.
Jeżeli współczynnik transformacji transformatora obniżającego n następnie prąd Ja przy wejściu będzie w n razy mniej. Ponadto będzie włączony prąd rozruchowy n razy mniej tj. prąd przy uruchomieniu w sieci będzie włączony n 2 razy mniej niż przy bezpośrednim uruchomieniu.
Ta metoda, choć lepsza niż rozważana w punkcie 3.14.7, jest znacznie droższa.
Uruchamianie silnika z wirnikiem fazowym.
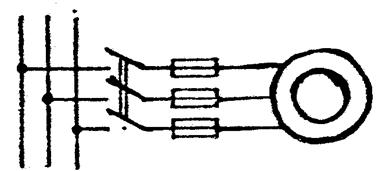
Uruchamianie silnika za pomocą wirnika fazowego odbywa się poprzez włączenie reostatu rozruchowego w obwodzie wirnika, jak pokazano na ryc.3.30. Początek faz uzwojenia wirnika jest połączony z pierścieniami ślizgowymi i za pomocą szczotek połączony z opornikiem rozruchowym Rp.
![]() Odporność wyjściowego reostatu na uzwojenie stojana Rp
oblicza się go tak, aby początkowy moment obrotowy był maksymalny, tj. równa krytycznej. Od początku poślizgu s P. \u003d 1 wtedy s P. = 1 = s K. równość M P \u003d M P max \u003d M K zostaną dostarczone. To
Odporność wyjściowego reostatu na uzwojenie stojana Rp
oblicza się go tak, aby początkowy moment obrotowy był maksymalny, tj. równa krytycznej. Od początku poślizgu s P. \u003d 1 wtedy s P. = 1 = s K. równość M P \u003d M P max \u003d M K zostaną dostarczone. To  .
.
Silnik uruchamia się zgodnie z krzywą pokazaną na ryc. 31. Przy uruchomieniu punkt pracy charakterystyki mechanicznej jest na swoim miejscu ale
, a gdy silnik przyspiesza, porusza się po krzywej 1
odpowiadający w pełni włączonemu reostatowi. W tej chwili odpowiadający punktowi e , pierwszy stopień reostatu jest włączony i moment przeskakuje do punktu b - punkt pracy silnika przechodzi na krzywą 2; w momencie odpowiadającym punktowi d drugi stopień reostatu wyłącza się, punkt roboczy przeskakuje do punktu z a silnik przechodzi do charakterystyki naturalnej 3, a następnie do punktu f. Reostat jest zwarty, uzwojenie wirnika jest zwarte, a szczotki są wycofywane z pierścieni. 
Dzięki temu wirnik fazowy umożliwia uruchomienie silników indukcyjnych dużej mocy przy ograniczonym prądzie rozruchowym. Jednak ta metoda początkowa wiąże się ze znacznymi stratami w wyjściowym reostacie. Ponadto silnik z wirnikiem fazowym jest droższy niż silnik klatkowy. Dlatego silnik z wirnikiem fazowym jest używany tylko przy wysokich wymaganiach dotyczących mocy i napędu.