Определение мощности электродвигателя по току. Выбор электродвигателя и расчет его рабочих параметров
Наиболее распространенным типом промышленных силовых установок являются асинхронные электродвигатели. Один из наиболее важных их параметров — мощность электродвигателя, которая в зависимости от модели может варьироваться в широких пределах. От мощности зависит тип энергосистемы, к которой двигатель можно подключить, а также тип и производительность оборудования, с которым он будет сопряжен. По этой причине, не зная мощность электродвигателя, использовать его практически невозможно.
Определение мощности электромотора по размерам сердечка статора
Если технического паспорта нет, можно произвести расчет мощности электродвигателя, исходя из размеров сердечника статора и частоты вращения. Для этого используется формула P 2H = C * D 1 2 / N 1 * 10 -6 кВт. Здесь:
С —постоянная мощность;
D — размер внутреннего диаметра сердечника статора в см;
l — длина статора в см;
N 1 — значение синхронной частоты вращения в об/мин.
Постоянная мощность зависит от частоты вращения и габаритов мотора. Она определяется по величине полюсного деления как зависимость мощности от количества полюсов и размеров полюсного деления τ, если U1 < 500В.
τ = πD 1 / 2р см.
2р здесь — количество полюсов в моторе.
Полученный по этой формуле результат необходимо округлить до наиболее подходящего значения в таблице. Это самый простой и доступный метод, по которому может быть осуществлен расчет мощности электродвигателя.
Подбор требуемой мощности электродвигателя
Правильно подобранная мощность электродвигателя позволяет получить оптимальные технико-экономические показатели электропривода по себестоимости, размерам, экономичности и прочим параметрам. При стабильной нагрузке на электродвигатель определить его мощность можно просто выбором по каталогу, исходя из соотношения Р н ≥ Р нагр. Здесь Р н — это мощность подбираемого двигателя, а Р нагр — предполагаемая мощность нагрузки.
Потребляемая мощность электромотора
Рисунок 1. Шильдик с параметрами на корпусе электродвигателя Работая с электромоторами, нужно знать, как по шильдику определяется потребляемая мощность электродвигателя. Значение мощности Р — это не электрическая мощность мотора, а механическая мощность на валу, обозначенная в кВт.
Чтобы найти потребляемую мощность, нужно обратить внимание на КПД и cosφ двигателя, указанные на шильдике. Причем КПД может быть обозначен как просто буквами КПД, так и буквой η, что и видно на шильдике. Сначала необходимо найти активную мощность, потребляемую двигателем от сети, по формуле Р а = Р / КПД.
Т. е. в нашем случае (рис. 1) потребляемая электродвигателем из сети активная мощность равна Р а = 0,75кВт/0,75 = 1 кВт. Теперь, чтобы найти полную потребляемую мощность, нужно воспользоваться формулой S = P a /cosφ = 1/0,78 = 1,28 кВт.
Коэффициент мощности электромотора
Коэффициент мощности электродвигателя, или cos φ — это соотношение активной и полной мощности двигателя. Определяется коэффициент мощности электродвигателя по формуле cosφ = P/S. Здесь:
Р — активная мощность в Вт;
S — полная мощность в ВА.
В большинстве случаев активная мощность имеет меньшее значение, чем полная, из-за чего коэффициент составляет меньше единицы. Только тогда, когда нагрузка будет исключительно активной, cosφ станет равен единице.
Чем ниже коэффициент мощности потребителя, тем более мощными должны быть трансформаторы, электрические станции, а также питающие линии электропередач. Кроме того, моторы с низким коэффициентом имеют меньший КПД и большие энергопотери.
Как выполнить расчёт потребляемой мощности асинхронного электродвигателя из сети, если по шильдикам можно узнать только номинальную мощность? Для этого необходимо:
- обратить внимание на остальные показатели – это η и cosφ (КПД и коэффициент мощности);
- учесть связь динамических характеристик вала и КПД.
P з=Р/η.
Но нужно помнить, что потребляемая энергия электрическими приборами включает в себя как активную, так и реактивную компоненту.
Активная мощность тратится на выполнение полезной работы и создание тепла. Обозначается буквой «P », измеряется в W и вычисляется:
P = I * U * cos φ.
Реактивная мощность создаётся колебаниями энергии электрического поля. Она обуславливает способность деталей реактивной машины сохранять и излучать электромагнитную энергию. Речь идёт о токе, который заряжает конденсатор или создает магнитное поле вокруг витков обмотки катушки. Обозначается буквой «Q », измеряется в Var и рассчитывается:
Q=I*U*sinφ.
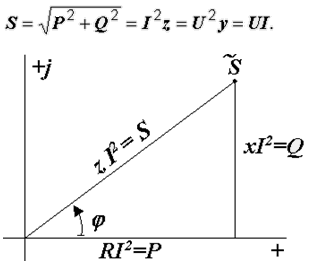
Полная мощность «S » представляется математической комбинацией по формуле теоремы Пифагора: S*S = Q*Q + P*P . Она измеряется в V*A и вычисляется:
S = P / cos φ = √(P 2 + Q 2)=I*U.
Реактивную мощность трехфазного асинхронного двигателя можно представить суммой двух составляющих: индуктивной и емкостной.
Лучшее представление данной величины может быть получено в виде векторной диаграммы, индуктивная составляющая – это положительная координата на оси Y, емкостная – отрицательная. Очевидно, что эти два значения несколько компенсируют друг друга, составляя координату вектора, которая будет либо положительной, либо отрицательной. Чем меньше угол между ними, тем полная мощность становится ближе к активной.
Коэффициент мощности cosφ для трёхфазного асинхронного двигателя равен 0,8–0,9. Если его необходимо увеличить, то довольно часто добавляют конденсаторы в цепи двигателя. Функция этих конденсаторов заключается в том, чтобы обеспечить намагничивающий ток, снижающий амплитуду реактивной составляющей. Чем выше cosφ , тем меньше электромашина потребляет энергии.
Как определить мощность электродвигателя?
Для того чтобы выполнить расчёт понадобятся измерительные инструменты и справочная информация. Итак, существуют варианты определения мощности электродвигателя:
- по току . Подаём питание на асинхронный электродвигатель. Поочередно делаем замеры тока в каждой обвивке амперметром. В итоге среднее значение тока умножается на напряжение и получается потребляемая мощность электродвигателя;
- по размерам . Замеряем диаметр и длину сердечника статора. Узнаем частоту оборотов вала. Далее, производим приближённый расчёт «постоянной» по формуле:
3,14 D n/(120 f).
На основе расчёта находим в справочнике константу. Вычисляем
P = C D² l n 10^(-6);
- по тяговой силе . Измеряем скорость оборотов вала с помощью тахометра, радиус вала обычной линейкой, тяговое усилие движка динамометром. Для расчёта все найденные значения перемножаем
P = M w = F 2 3,14 n r .
На основе этих математических выражений можно сделать вывод, что асинхронные двигатели могут иметь одинаковую мощность, но различаться по частоте вращения вала, что существенно влияет на его габариты. Рассмотрим также смысл использования регуляторов мощности.
Какие бывают виды регуляторов?
Существует два вида регуляторов, доступных на сегодняшнем рынке:
- на переменном резисторе,
- электронный (шаговый и подвижный).
Все они обладают разными способами управления скоростью вращения и, посему, эффективность (потребление электроэнергии) у каждого вида отличается. С этой точки зрения, классический регулятор – самый дешевый, но неэффективный. Давайте рассмотрим все три типа.
Регулятор на переменном резисторе

На самом деле этот реостат имеет внутри огромную катушку. Выбирая низкие параметры скорости, мы, по сути, выбираем более высокое сопротивление цепи. Это приводит к снижению потребляемого тока (так как напряжение является фиксированной величиной). Аппараты громоздкие по размеру и недорогие по цене.
Электронный регулятор
Электронные – это новейшие типы из доступных регуляторов на рынке. Они намного меньше по размерам, чем другие. Для понижения напряжения в них используются вместо резисторов конденсаторы, которые регулируя скорость вращения, управляют сигналом электропитания. В отличие от реостатов не нагреваются и, значит, экономят электроэнергию, когда мотор работает на малых скоростях.
Регуляторы способны сэкономить до 40% на «1» скорости и около 30% на «2-й» скорости по сравнению со своими резисторными аналогами. Существуют электронные разновидности регуляторов.
Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка».
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей
Двигатели постоянного тока
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором.
Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ =1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
Асинхронные двигатели.
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P 2 [кВт] некоторых механизмов.
- Вентилятор .
где Q [м 3 /с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
η вент , η пер – КПД вентилятора и передаточного механизма соответственно,
k з – коэффициент запаса.
- Насос
где Q [м 3 /с] – производительность насоса,
g =9,8 м/с 2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м 3 ] – плотность перекачиваемой жидкости,
η нас , η пер – КПД насоса и передаточного механизма соответственно,
k з – коэффициент запаса.
- Поршневой компрессор
где Q [м 3 /с] – производительность компрессора,
А [Дж/м 3 ] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м 3 давлением 1,1·10 5 Па до требуемого давления,
η компр , η пер – КПД компрессора и передаточного механизма соответственно,
k з – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р 2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
для двигателей постоянного тока (она же активная)
для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q 1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
- Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
- Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
- Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
- Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5 . Данные режимы рассматриваются аналогично режиму S3.
- Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
где Р 2 – полезная мощность на валу, Р 1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.
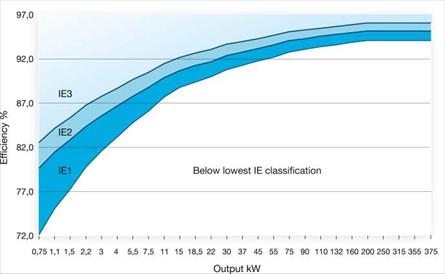
Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещения
ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).
Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
1 – на открытом воздухе;
2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков;
3 – в закрытых помещениях без искусственного регулирования климатических условий;
4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия:
У – умеренный климат;
УХЛ – умеренно холодный климат;
ХЛ – холодный климат;
Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
1. экономия электроэнергии;
2. плавность пуска и снижение пусковых токов;
3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.